Uma dissertação de mestrado, defendida no programa de pós-graduação em Engenharia Elétrica do Instituto de Ciência e Tecnologia da Unesp em Sorocaba, ganhou o primeiro lugar no Concurso de Teses e Dissertações em Robótica de 2022, realizado pela Sociedade Brasileira de Computação (SBC). O anúncio foi feito no dia 19 de outubro, durante o Robótica 2022, o maior evento da área na América Latina, que reúne pesquisas, projetos e competições de robótica e de inteligência artificial (IA). A pesquisa, conduzida por Leonardo de Lellis Rossi e orientada por Alexandre da Silva Simões, buscou simular, em um robô, as etapas de aprendizagem experimentadas por um bebê humano em seus meses iniciais de vida, a fim de testar um novo modelo de aprendizagem de máquina que depende das experiências e memórias do próprio robô.
Rossi diz que o interesse pelo tema da pesquisa surgiu pelo ar de “ficção científica” que o tema evoca. Em dois capítulos da dissertação, ele usou como epígrafes frases retiradas de duas obras clássicas que versam sobre IA, o filme Matrix e o livro “Eu, Robô”. Igualmente importantes foram os estudos anteriores sobre o tema da consciência de máquina ensejados por Alexandre Simões, e Rossi continua a aprofundar a investigação, agora no doutorado.
Simões, que é professor do Instituto de Ciência e Tecnologia da Unesp, diz que há anos o campo da robótica busca meios para desenvolver robôs que sejam dotados de um tal grau de autonomia que lhes permita se adaptar a situações que fogem dos cenários previstos em sua programação inicial. O objetivo é que as máquinas consigam lidar com imprevistos e escolher a melhor maneira de agir frente a eles.
Essa abordagem teve início quando a comunidade de pesquisa percebeu que, antes do recurso da aprendizagem de máquina, o desenvolvimento de IA levava a robôs muito limitados, que se mostravam eficientes apenas em situações muito específicas e controladas. Nesses cenários muito controlados, é possível descrever todas as variáveis e “imprevistos” que o robô irá encontrar e determinar como ele deve reagir em cada momento. Entretanto, quando algo foge minimamente do esperado, a máquina não tem capacidade de responder ao acontecimento.
Tentando solucionar essa questão, as técnicas de aprendizado de máquina têm ganhado cada vez mais visibilidade. “É muito mais fácil deixar um agente qualquer aprendendo, seja um software ou um robô, do que tentarmos explicar tudo para ele”, diz Simões.
Aprender como um ser humano
Uma das vertentes de estudo, no campo do aprendizado de máquina, é denominada sistemas cognitivos. Ela envolve o desenvolvimento de sistemas de inteligência artificial inspirados no sistema cognitivo humano. Os pesquisadores desta linha buscam formas de fazer com que os robôs sejam capazes de coordenar uma série de processos distintos, como memória, raciocínio, planejamento e aprendizado, de maneira que o agente possa ter reações mais complexas.
Uma das hipóteses que embasam essa linha de pesquisa é que, mais fácil do que tentar montar um sistema com o conhecimento equivalente ao de um humano adulto, seria permitir que a máquina adquirisse essas habilidades gradualmente, passando por estágios similares aos da infância. Esta abordagem permite que o sistema inicial seja tecnicamente muito mais simples e que a própria máquina o aprimore, à medida que ela vai acumulando experiências.
“A ideia é que ele tenha uma programação elementar e, com o tempo, vá formulando suas próprias memórias, apague outras memórias, junte conceitos e, assim, ele vai aprendendo, com base nas ligações que faz das experiências anteriores”, explica Simões. A grande questão do campo é como fazer com que os robôs sejam capazes de criar essas conexões, e ligar conhecimentos, com base no que eles aprendem e experienciam.
A dissertação de Rossi seguiu essa linha e buscou desenvolver modelos iniciais que possibilitassem um aprendizado de máquina via sistemas cognitivos. Intitulado “Aprendizado sensório-motor em robôs cognitivos utilizando modelo CST-CONAIM”, o trabalho também contou com coorientação da professora Esther Luna Colombini, da Unicamp. O objetivo foi realizar experimentos em um robô que simulassem os meses iniciais de vida de um bebê, para verificar se o modelo, desenvolvido pelo grupo do qual faz parte, era capaz de fazer com que o robô apresentasse as ações de aprendizagem esperadas.
O jovem pesquisador buscou, na psicologia infantil de Jean Piaget, as bases teóricas para o desenvolvimento do modelo. O pesquisador suiço é mundialmente reconhecido por sua teoria denominada “epistemologia genética”. Segundo ela, seres humanos são submetidos a fases de desenvolvimento cognitivo, a partir do momento do seu nascimento. Piaget descreveu as características de cada estágio e subestágio, sendo o sensório-motor o primeiro deles. Partindo dessa construção teórica, Rossi executou três experimentos para testar o modelo e simular o aprendizado sensório-motor inicial, descrito nos três primeiros subestágios da teoria de Piaget, também conhecidos como uso dos reflexos, reações circulares primárias e reações circulares secundárias. “Antes de começarmos a andar, tivemos que primeiro explorar e conhecer nosso próprio corpo, entender nossa capacidade motora e nossa intenção com o ambiente”, escreve Rossi no trabalho.
Segundo a teoria de Piaget, no primeiro subestágio sensório-motor, que ocorre entre o nascimento e o primeiro mês de vida, o bebê demonstra cada vez mais controle sobre seus reflexos e passa a ter comportamentos padrões, como o ato de mamar ou de segurar o dedo de outra pessoa. Em seguida, no segundo subestágio, compreendido entre o 1º e o 4º mês, o bebê passa a repetir ações que despertaram sensações agradáveis, de maneira proposital. Neste ponto, passa a existir a intencionalidade. Por fim, o terceiro subestágio ocorre entre o 4º e o 8º mês de vida e está relacionado à antecipação. Ao longo desse tempo os bebês têm um aumento na coordenação de suas ações e, também, passam a antecipar o que vai acontecer, de maneira a direcionar seu foco. “Ele é capaz de entender que a bola vai cair em um determinado local, então ele já fica olhando lá, para confirmar que isso vai acontecer”, explica Simões.
Colocando a teoria na prática
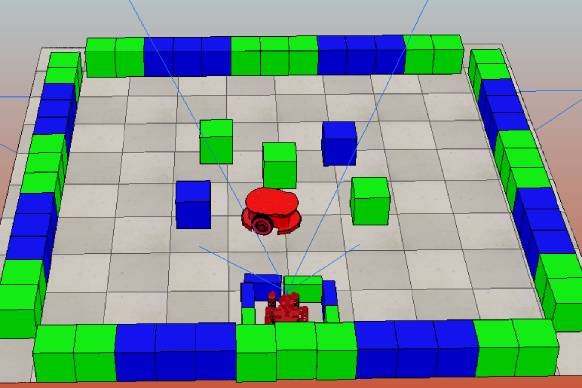
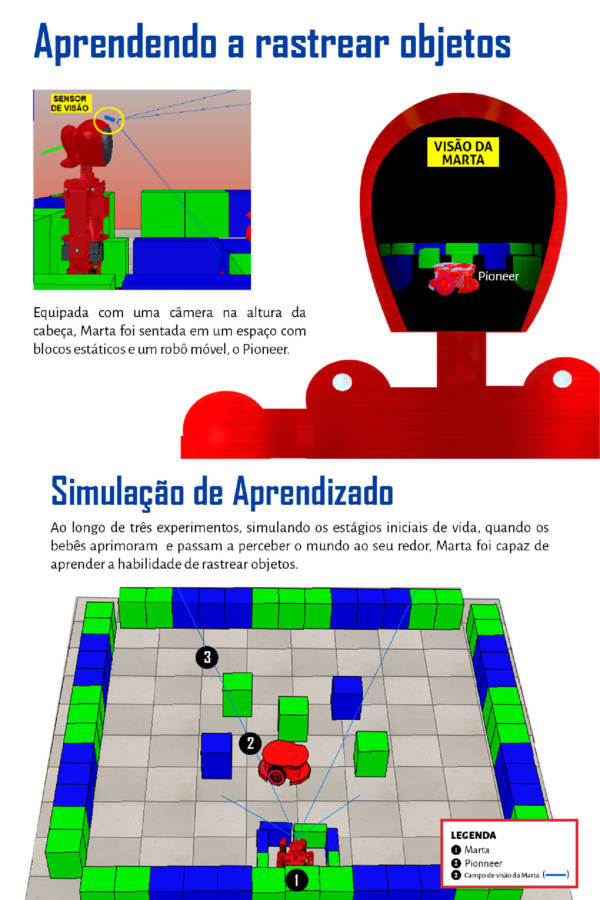
Para a simulação, Rossi utilizou a robô Marta, integrante do grupo de pesquisa e que recebeu este nome em homenagem à Marta da Silva, jogadora de futebol. Os experimentos tinham como objetivo explorar a habilidade de aprender como acompanhar e rastrear outro agente móvel. Para isso, a robô foi equipada com uma câmera na altura da sua cabeça, para simular a visão, e foi posicionada em um ambiente com cubos azuis e verdes, de tamanhos variados, e com um robô móvel, o Pioneer, que se movimentava pelo espaço e desviava dos cubos.
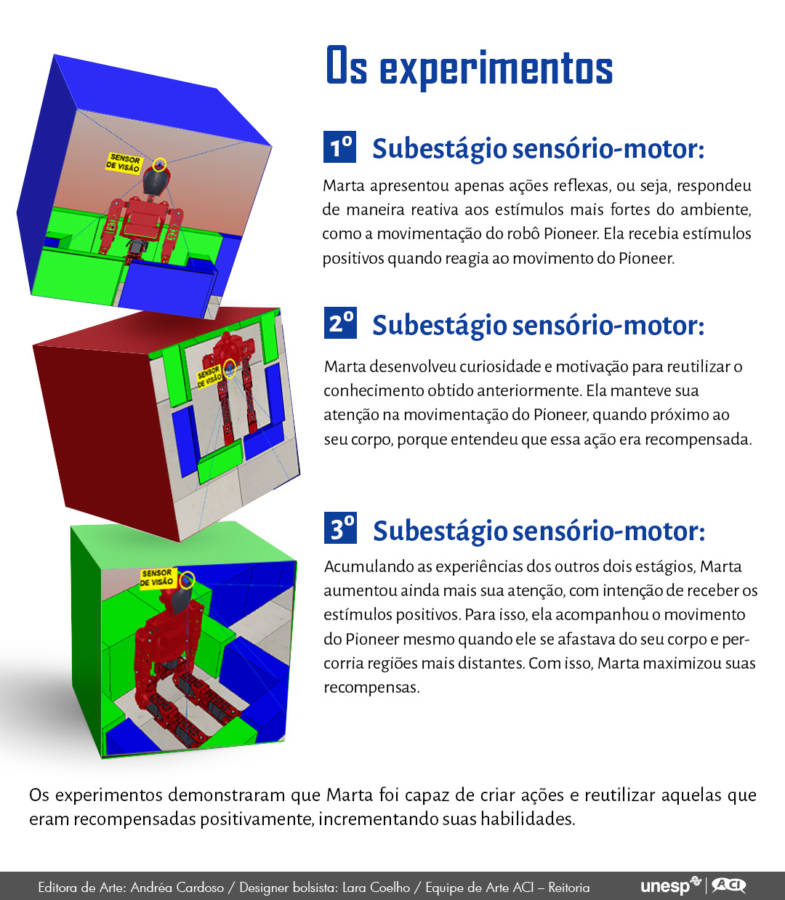
No primeiro experimento, que buscava simular o subestágio relacionado aos reflexos, a robô Marta foi colocada na área de teste com o modelo em estágio inicial, responsável apenas por fazer com que ela percebesse a existência dos objetos que a rodeavam. “Nesse primeiro momento, ela só respondia reativamente aos estímulos que recebia do ambiente. Não demonstrava curiosidade, motivação ou intencionalidade”, comenta Rossi. O processo objetivava identificar se ela era capaz de desenvolver reflexos. Para isso, os pesquisadores observaram a capacidade de atenção da robô quando o Pioneer passava próximo a ela, além do movimento do campo de visão.
O procedimento era reiniciado toda vez que a agente caía, ou a cada 5 interações seguidas nas quais ela não demonstrava estar atenta ao outro agente, mesmo que ele entrasse no seu campo de visão. A cada ação, Marta recebia estímulos positivos ou negativos, representados por pontuações, conforme sua capacidade de manter ou não a atenção. Ao final do primeiro experimento, a robô já era capaz de direcionar seu campo de visão e manter o foco, de maneira a aumentar sua recompensa.
No segundo experimento, Marta desenvolveu curiosidade e motivação a partir das reações reflexas adquiridas anteriormente. Sua função de motivação fazia com que ela sentisse a necessidade de adquirir mais conhecimento. Aqui, a robô decidiu focar e repetir ações que percebeu que atraíam recompensas maiores. Isso incluía, por exemplo, manter a atenção no robô móvel quando este estava próximo do seu corpo. É importante ressaltar que nos dois primeiros subestágios as ações da Marta estavam relacionadas apenas com sua pré-programação e com os estímulos externos. Rossi diz que este caráter pré-programado pode ser considerado como o equivalente aos instintos humanos.
Por fim, no último experimento Marta desenvolveu intencionalidade, ou seja, parou de responder apenas instintivamente e passou a direcionar ativamente sua atenção para coisas interessantes para ela. Marta manteve sua atenção total no robô Pioneer, aproveitando as experiências adquiridas nos outros dois estágios e percebendo que, dessa forma, suas recompensas eram maximizadas. Dessa forma, mesmo quando ele se distanciava, a robô seguia atenta, observando seu trajeto.
Os experimentos demonstraram que a robô Marta foi capaz de aumentar gradualmente sua capacidade de atenção e interação com os objetos do cenário, reutilizando e aprimorando ações que eram recompensadas positivamente. Ao final dos testes, a robô conseguiu desenvolver a habilidade de rastrear objetos e demonstrar mais interesse pelo objeto móvel do que pelos estáticos.
Simões reconhece que a área de sistemas cognitivos ainda está em seus passos iniciais, e que as pesquisas enfrentam dificuldades intrínsecas a esta etapa atual. “Quando alguém atua em regiões que estão na fronteira do conhecimento, o conhecimento ainda está muito disperso. Por exemplo, a linguagem que um autor usa para definir um tópico não é a mesma empregada por outro autor, ainda que eles estejam falando da mesma coisa”, diz. Apesar das dificuldades, Simões defende que os sistemas cognitivos serão a próxima onda de estudos em inteligência artificial.
Nesse sentido, em 7 de novembro de 2021, foi criado o Hub de Inteligência Artificial e Arquiteturas Cognitivas (HIAAC), na Unicamp. A iniciativa tem o objetivo de reunir pesquisadores para o desenvolvimento de estudos que visem a ampliação da capacidade cognitiva e de tomada de decisão de dispositivos móveis. O professor Simões integra a equipe do hub, na linha de Aprendizado e Teorias Cognitivas. Rossi também faz parte do grupo, sendo bolsista de doutorado na área de Arquiteturas Cognitivas. Atualmente, Rossi desenvolve seu doutorado na mesma linha, na Faculdade de Engenharia Elétrica e Computação, da Unicamp, sob orientação do professor Ricardo Ribeiro Gudwin e coorientação da professora Colombini, também integrantes do hub.
“Outro ponto que me motiva nessa área é o seu caráter multidisciplinar e as discussões que ocorrem, tanto nos nossos contextos das engenharias, da computação e das exatas, quanto nos contextos humanos, filosóficos e psicológicos. A mente humana é incrível, ela já foi estudada de diferentes formas, mas ainda nos questionamos sobre seu funcionamento”, diz Rossi.
Imagem de abertura: descrição dos experimentos da robô Marta. Crédito: Leonardo Rossi.